Intelligent Adaptive PID Control for Ship Motion Using Radial Basis Function Artificial Neural Networks
DOI:
https://doi.org/10.51173/jt.v8i2.2915Keywords:
Adaptive PID Control, Radial Basis Function (RBF), Neural Network, Ship Dynamics, Motional Control, Tracking Accuracy, Tracking PerformanceAbstract
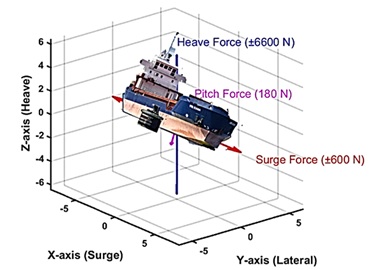
This study presents an intelligent adaptive PID controller based on Radial Basis Function neural network (PID–RBF) for motion control of a ship subjected to surge, heave, and pitch dynamics. The proposed controller adjusts PID parameters based on tracking errors to perfectly follow the desired trajectory and compensate for nonlinearity and uncertainty. The numerical simulations show that the proposed adaptive PID–RBF controller outperforms the traditional adaptive PID control in terms of accuracy and dynamic performance. The control efforts required by the proposed method have been considerably reduced. In the surge channel, the control energy is reduced from the value to , while there is a reduction in control energy from to in the sense of pitch channel motion. In addition, the control signal from the proposed PID-RBF controller is smoother than that from the conventional control approach. This indicates that the proposed controller could reduce stress on the actuator and thereby keep it in a safe operating range by lowering the maximum control signal input. In addition, the results show that the proposed controller has better rejection capability and robustness than the conventional controller. The proposed PID–RBF controller demonstrates promising performance in the motion control of a ship across three motion channels (surge, heave, and pitch).
Downloads
References
N. M. Noaman, A.S. Gatea, A. J. Humaidi, S.K. Kadhim, A.F. Hasan, "Optimal Tuning of PID-Controlled Magnetic Bearing System for Tracking Control of Pump Impeller in Artificial Heart," Journal Européen des Systèmes Automatisés, vol. 56, no. 1, pp. 21-27, 2023. DOI: https://doi.org/10.18280/jesa.560103.
A.J. Humaidi, A. A. Oglah, S. J. Abbas, I. K. Ibraheem, "Optimal Augmented Linear and Nonlinear PD Control Design for Parallel Robot Based on PSO Tuner," International Review on Modelling and Simulations (I.RE.MO.S.), vol.12, no. 5, pp. 281-291, 2019. DOI: 10.15866/iremos.v12i5.16298
A.F. Hasan, N. Al-Shamaa, S.S. Husain, A.J. Humaidi, A. Al-Dujaili, A., "Spotted Hyena Optimizer enhances the performance of Fractional-Order PD controller for Tri-copter drone," International Review of Applied Sciences and Engineering, vol. 15, no. 1., pp. 82–94, 2024, DOI: https://doi.org/10.1556/1848.2023.00659
N. S. Mahmood, A.J. Humaidi, R.S. Al-Azzawi, "Nonlinear PD State Feedback Control for Electronic Throttle Valve Based on Ant Colony Optimization," 2023 IEEE 11th Conference on Systems, Process and Control, ICSPC 2023 - Proceedings, pp. 38–43, 2023. DOI: 10.1109/ICSPC59664.2023.10420124.
A.F.A. Ahmed, I.M. Elzein, M.M. Mahmoud, S.A.E.M. Ardjoun, A.M. Ewias, and U. Khaled, "Optimal Controller Design of Crowbar System for DFIG-based WT: Applications of Gravitational Search Algorithm," Buletin Ilmiah Sarjana Teknik Elektro, vol. 7, no. 2, pp.122-136, 2025. DOI:10.12928/biste.v7i2.13027.
R.D. Hendriyanto, R.D. Puriyanto, A. Ma'arif, M.A.M Vera, O.I.A. Nugroho, and C. Chivon, "Control of Water Flow Rate in a Tank Using the Integral State Feedback Based on Arduino Uno," Control Systems and Optimization Letters, vol. 2, no. 3, pp.357-365, 2024. DOI:10.59247/csol.v2i3.162.
S.M. Mahdi, A.I. Abdulkareem, A.J. Humaidi, "Improved Tracking Accuracy of Par-4 Delta Parallel Robot Using Optimized FOPID Control with PSO Technique," Journal of Robotics and Control JRC, vol. 6, no. 4, pp. 1721–1728, 2025. DOI:10.18196/jrc.v6i4.26607.
H. Mohammed, B. Midhat, and F. Raheem, "PID and Fuzzy Logic Controller Design for Balancing Robot Stabilization," Iraqi Journal of Computers, Communications, Control and Systems Engineering, vol. 18, no. 1, pp. 1-10, 2018.
N. Thongpance, P. Chotikunnan, A. Wongkamhang, R. Chotikunnan, P. Imura, W. Khotakham, A. Nirapai, and K. Roongprasert, "Comparative Analysis of PID Tuning Methods for Speed Control in Mecanum-Wheel Electric Wheelchairs," Buletin Ilmiah Sarjana Teknik Elektro, vol. 7, no. 2, pp.95-110, 2025. DOI:10.12928/biste.v7i2.13046.
A.F. Hasan, F.A. Raheem, A.J. Humaidi, "Improving Pressure Control in Artificial Ventilation Systems Using a Neural Network-Based Adaptive PID Controller," Automation, vol.7, no. 2, p.37, 2026. DOI: 10.3390/automation7020037.
A. Al-Jodah, S.J.Abbas, A.F. Hasan, A.J. Humaidi, A.S.M. Al-Obaidi, A.A. AL-Qassar, and R.F. Hassan, "PSO-based optimized neural network PID control approach for a four wheeled omnidirectional mobile robot," International Review of Applied Sciences and Engineering, vol. 14, no. 1, pp. 58–67, 2023. DOI:10.1556/1848.2022.00420
N. A. Al-Awad, I. K. Abboud, and M. F. Al-Rawi, “Genetic Algorithm-PID Controller for Model Order Reduction Pantograph catenary System”, Applied Computer Science, vol.17, no. 2, pp. 28–39, 2021. DOI:10.35784/acs-2021-11
T. Dlabač, M. Ćalasan, M. Krčum and N. Marvučić, "PSO-based PID Controller Design for Ship Course-Keeping Autopilot," Brodogradnja: An International Journal of Naval Architecture and Ocean Engineering for Research and Development, vol. 70, no. 4, pp. 1-15, 2019. DOI: 10.21278/brod70401.
V. Nicolau, "On PID Controller Design by Combining Pole Placement Technique with Symmetrical Optimum Criterion," Mathematical 354 Problems in Engineering, vol. 2013, no. 1, p316827, 2013. DOI:10.1155/2013/316827
K. J. Åström and T. Hägglund, "Advanced PID Control," ISA, 2006. DOI:10.1002/9781394442102.
Z. Zhiping and Z. Qiang, "Adaptive Self-Regulation PID Tracking Control for the Ship Course," Chinese Journal of Ship Research, vol. 14, no. 3, pp. 145-151, 2019. DOI: 10.19693/j.issn.1673-3185.01305.
Q. Zhang, Z. Ding, and M. Zhang, "Adaptive Self-Regulation PID Control of Course-Keeping for Ships," Polish Maritime Research, vol. 27, no. 1, pp. 39-45, 2020. DOI:10.2478/pomr-2020-0004.
F.G. Martins and M.A. Coelho, "Application of Feedforward Artificial Neural Networks to Improve Process Control of PID-based Control Algorithms," Computers and Chemical Engineering, vol. 24, no. (2-7), pp. 853-858, 2000. DOI:10.1016/S0098-1354(00)00339-2.
J. Rivera-Mejía , A. G Léon-Rubio, and E. Arzabala-Contreras, "PID based on a Single Artificial Neural Network Algorithm for Intelligent Sensors," Journal of applied research and technology, vol. 10, no .2, pp. 262-282, 2012. DOI:10.22201/icat.16656423.2012.10.2.417.
G. De Masi, F. Gaggiotti, R. Bruschi and M. Venturi, "Ship motion prediction by radial basis neural networks," 2011 IEEE Workshop On Hybrid Intelligent Models and Applications, Paris, France, 2011, pp. 28-32, DOI: 10.1109/HIMA.2011.5953967.
M.Y. Hasan, D.J. Kadhim, and A.J. Humaidi, "Prediction of Electricity-Consumption and Residential Bills based on Artificial Neural Network," International Review of Applied Sciences and Engineering, vol. 16, no. 1, pp.142-152, 2025. DOI: 10.1556/1848.2024.00856
L. Zhang, S. Li, Y. Xue, H. Zhou and Z. Ren, "Neural Network PID Control for Combustion Instability," Combustion Theory and Modelling, vol. 26, no, 2, pp. 383-398, 2022. DOI:10.1080/13647830.2022.2025908.
M.C. Fang, Y. Z. Zhuo, and Z. Y. Lee, "The application of the self-tuning neural network PID controller on the ship roll reduction in random waves," Ocean Engineering, vol. 37, no.7, pp.529-538, DOI: 10.1016/j.oceaneng.2010.02.013.
J. Yu, R. Bu and L. Li, "Ship RBF Artificial Neural Network Sliding Mode PID Heading Control," In MATEC Web of Conferences, vol. 355, p. 03064, 2022, DOI: 10.1051/matecconf/202235503064.
M. H. Enad, R.F. Hassan, A.A. Khaleel Mahmoud, and A.J. Humaidi, "Performance Evaluation of a 2DOF_PID Controller Using Metaheuristic Optimization Algorithms," Journal Europeen Des Systemes Automatises, vol. 57, no. 3, pp. 709–715, 2024. DOI:10.18280/jesa.570308.
A.A. Hassan, N.K. Al-Shamaa, and K.K. Abdalla, "Comparative Study for DC Motor Speed Control using PID Controller," International Journal of Engineering and Technology, vol. 9, no. 6, pp.4181-4192, 2017. DOI:10.21817/ijet/2017/v9i6/170906069
N. Setiawan, W. Caesarendra, and R. Majdoubi, “Implementation of Kalman Filter on PID Control System for DC Motor Under Noisy Condition”, Buletin Ilmiah Sarjana Teknik Elektro, vol. 6, no. 3, pp. 271–280, 2024. DOI:10.12928/biste.v6i3.11236.
A.G. Alexandrov, and M.V. Palenov, "Adaptive PID Controllers: State of the Art and Development Prospects," Automation and Remote Control, vol. 75, pp. 188-199, 2014. DOI: 10.1134/S0005117914020027.
L. Xiao, "Parameter Tuning of PID Controller for Beer Filling Machine Liquid Level Control Based on Improved Genetic Algorithm," Computational Intelligence and Neuroscience, 7287796, pp. 1-10, DOI: 10.1155/2021/7287796.
G.A. Ibraheem, A.T. Azar, I.K. Ibraheem and A.J. Humaidi, "A Novel Design of a Neural Network-Based Fractional PID Controller for Mobile Robots Using Hybridized Fruit Fly and Particle Swarm Optimization," Complexity, 3067024, pp. 1-18, 2020, DOI:10.1155/2020/3067024.
L.T. Rasheed, "An Optimal Modified Elman-PID Neural Controller Design for DC/DC Boost Converter Model," Journal of Engineering Science and Technology, vol. 18, no. 2, pp.880-901, 2023.
S. Z. Oleiwi, H.Z. Khaleel, R. Z. Khaleel, M.M. Msallam, A.J. Humaidi, "Smart IoT Irrigation System Using PID-PSO Optimization Method," Advances in Technology Innovation, vol. 11, no. 1, pp. 70–78, 2026, DOI: 10.46604/aiti.2026.15357.
D. Ma and J. Li, "Dynamic Modelling and Optimization of an Eight Bar Stamping Mechanism based on RBF Artificial Neural Network PID control," Frontiers in Mechanical Engineering, VOL. 10, 1374491, 2024. DOI: 10.3389/fmech.2024.1374491.
K. Dileep, S.J. Mija and N.K. Arun, "Radial Basis Function Artificial Neural Network Based PID Tuning for Trajectory Tracking in Robot Manipulator," In 2024 15th International Conference on Computing Communication and Networking Technologies (ICCCNT), pp. 1-7, 2024. DOI:10.1109/ICCCNT61001.2024.10726062
S. J. Kim, M. Jin and J. H. Suh, "A Study on the Design of Error-based Adaptive Robust RBF Artificial Neural Network Back-Stepping Controller for 2-DOF Snake Robot’s Head, " IEEE Access, vol. 11, 2023. DOI:10.1109/ACCESS.2023.3249346
C. Kalu, B.U.A. Stephen and M.C. Uko, "Empirical Valuation of Multi-Parameters and RMSE-based Tuning Approaches for the Basic and Extended Stanford University Interim (SUI) Propagation Models," Mathematical and Software Engineering, vol. 3, no. 1, pp.1-12, 2017.
M.Y. Hasan, A.S. Alaraji, A.J. Humaidi, and H. Al-Khazraji, "Adaptive Filtered-x Least Mean Square Algorithm to Improve the Performance of Multi-Channel Noise Control Systems," Mathematical and Computational Applications, vol. 30, no. 4, p.84, 2025, DOI:10.3390/mca30040084.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Maha Yousif Hasan, Noor Q. Yousif, Mohammed K. Hamzah, Huthaifa Al-Khazraji, Amjad J. Humaidi, Farouk Zouari

This work is licensed under a Creative Commons Attribution 4.0 International License.